Sensing in autonomous vehicles is a growing field due to a wide array of military and reconnaissance applications. The Adaptive Communications and Signals Processing Group (ACSP) research group at Cornell specializes in studying various aspects of autonomous vehicle control. Previously, ACSP has examined video sensing for autonomous control. The goal of the robot is to build autonomous vehicles based on audio source tracking for autonomous control using microcontroller.
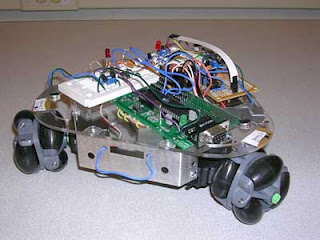
The project involves implementing a signal processing system for audio sensing and manipulation for the control of an autonomous vehicle. We are working with the ACSP to develop PeanutBot to help advance their research in audio sensor networks. Our system will have two modes, autonomous and control. In autonomous mode, the robot will detect and follow pulses of a predetermined set of frequencies and the robot will approach the source. In control mode, the robot will execute commands by an administrator on PC transmitted to the robot via an RS-232 serial connection.
Link: source
Tag :
Microcontroller,
project

0 Komentar untuk "The Audio Homing Robot based on ATMega32 Microcontroller"